Шим генератор xy pwm применение. Широтно-импульсная модуляция. Что такое широтно-импульсная модуляция
Необходимость регулировки постоянного напряжения
для питания мощных инерционных нагрузок чаще всего возникает у владельцев автомобилей и другой авто-мото техники. Например, появилось желание плавно менять яркость ламп освещения салона, габаритных огней, автомобильных фар или вышел из строя узел регулирования оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока потребления этими устройствами - если устанавливать транзисторный регулятор напряжения
, компенсационный или параметрический, на регулирующем транзисторе будет выделяться очень большая мощность, что потребует установки больших радиаторов или введения принудительного охлаждения с помощью малогабаритного вентилятора от компьютерных устройств.
Выходом из положения является применение широтно - импульсных схем, управляющих мощными полевыми силовыми транзисторами MOSFET . Эти транзисторы могут коммутировать очень большие токи (до 160А и более) при напряжении на затворе 12 - 15 В. Сопротивление открытого транзистора очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы управления должны обеспечивать разность напряжений между затвором и истоком не менее 12 ... 15 В, в противном случае сопротивление канала сильно увеличивается и рассеиваемая мощность значительно возрастает, что может привести перегреву транзистора и выходу его из строя. Для широтно - импульсных автомобильных низковольтных регуляторов выпускаются специализированные микросхемы, например U 6 080B ... U6084B , L9610, L9611, которые содержат узел повышения выходного напряжения до 25 -30 В при напряжении питания 7 -14 В, что позволяет включать выходной транзистор по схеме с общим стоком, чтобы можно было подключать нагрузку с общим минусом, но достать их практически невозможно. Для большинства нагрузок, которые потребляют ток не более 10А и не могут вызвать просадку бортового напряжения можно использовать простые схемы без дополнительного узла повышения напряжения.
Первый ШИМ регулятор собран на инверторах логической К МОП микросхемы. Схема представляет собой генератор прямоугольных импульсов на двух логических элементах, в котором за счёт диодов раздельно меняется постоянная времени заряда и разряда частотозадающего конденсатора, что позволяет изменять скважность выходных импульсов и значение эффективного напряжения на нагрузке.
В схеме можно использовать любые инвертирующие КМОП элементы, например К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы. Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно использовать транзистор с как можно большим максимальным током, т.к. у него меньшее сопротивление открытого канала, что уменьшает рассеиваемую мощность и позволяет использовать радиатор меньшей площади.
Достоинство ШИМ-регулятора на микросхеме К561ЛН2
- простота и доступность элементов,
недостатки
- диапазон изменения выходного напряжения чуть меньше 100% и невозможно доработать схему с целью введения дополнительных режимов, например плавного автоматического увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения сопротивления переменного резистора, а не изменением уровня управляющего напряжения.
Гораздо лучшими характеристиками обладает вторая схема, но количество элементов в ней чуть больше.
![]()
Регулировка эффективного значения напряжения на нагрузке от 0 до 12 В производится изменением напряжения на управляющем входе от 8 до 12 В. Диапазон регулировки напряжения практически 100%. Максимальный ток нагрузки полностью определяется типом силового полевого транзистора и может быть очень значительным. Так как выходное напряжение пропорционально входному управляющему напряжению, схема может использоваться как составная часть системы регулирования, например системы поддержания заданной температуры, если в качестве нагрузки использовать нагреватель, а датчик температуры подключить к простейшему пропорциональному регулятору, выход которого подключается к управляющему входу устройства. Описанные устройства имеют в основе несимметричный мультивибратор, но ШИМ регулятор можно построить на микросхеме ждущего мультивибратора
В некоторых случаях, например, в фонариках или домашних осветительных приборах, возникает необходимость регулировать яркость свечения. Казалось бы, чего уж проще: достаточно изменить ток через светодиод, увеличив или уменьшив . Но в этом случае на ограничительном резисторе будет расходоваться значительная часть энергии, что совсем недопустимо при автономном питании от батарей или аккумуляторов.
Кроме того, цвет свечения светодиодов будет изменяться: например, белый цвет при понижении тока меньше номинального (для большинства светодиодов 20мА) будет иметь несколько зеленоватый оттенок. Такое изменение цвета в ряде случаев совершенно ни к чему. Представьте себе, что эти светодиоды подсвечивают экран телевизора или компьютерного монитора.
В этих случаях применяется ШИМ - регулирование (широтно - импульсное) . Смысл его в том, что периодически зажигается и гаснет. При этом ток на протяжении всего времени вспышки остается номинальным, поэтому спектр свечения не искажается. Уж если светодиод белый, то зеленые оттенки появляться не будут.
К тому же при таком способе регулирования мощности потери энергии минимальны, КПД схем с ШИМ регулированием очень высок, достигает 90 с лишним процентов.
Принцип ШИМ - регулирования достаточно простой, и показан на рисунке 1. Различное соотношение времени зажженного и погашенного состояния на глаз воспринимается как : как в кино - отдельно показываемые поочередно кадры воспринимаются как движущееся изображение. Здесь все зависит от частоты проекции, о чем разговор будет чуть позже.

Рисунок 1. Принцип ШИМ - регулирования
На рисунке изображены диаграммы сигналов на выходе устройства управления ШИМ (или задающий генератор). Нулем и единицей обозначены : логическая единица (высокий уровень) вызывает свечение светодиода, логический нуль (низкий уровень), соответственно, погасание.
Хотя все может быть и наоборот, поскольку все зависит от схемотехники выходного ключа, - включение светодиода может осуществляться низким уровнем а выключение, как раз высоким. В этом случае физически логическая единица будет иметь низкий уровень напряжения, а логический нуль высокий.
Другими словами, логическая единица вызывает включение какого-то события или процесса (в нашем случае засвечивание светодиода), а логический нуль должен этот процесс отключить. То есть не всегда высокий уровень на выходе цифровой микросхемы является ЛОГИЧЕСКОЙ единицей, все зависит от того, как построена конкретная схема. Это так, для сведения. Но пока будем считать, что ключ управляется высоким уровнем, и по-другому просто быть не может.
Частота и ширина управляющих импульсов
Следует обратить внимание на то, что период следования импульсов (или частота) остается неизменным. Но, в общем, частота импульсов на яркость свечения влияния не оказывает, поэтому, к стабильности частоты особых требований не предъявляется. Меняется лишь длительность (ШИРИНА), в данном случае, положительного импульса, за счет чего и работает весь механизм широтно-импульсной модуляции.
Длительность управляющих импульсов на рисунке 1 выражена в %%. Это так называемый «коэффициент заполнения» или, по англоязычной терминологии, DUTY CYCLE. Выражается отношением длительности управляющего импульса к периоду следования импульсов.
В русскоязычной терминологии обычно используется «скважность» - отношение периода следования к времени импульс а. Таким образом если коэффициент заполнения 50%, то скважность будет равна 2. Принципиальной разницы тут нет, поэтому, пользоваться можно любой из этих величин, кому как удобней и понятней.
Здесь, конечно, можно было бы привести формулы для расчета скважности и DUTY CYCLE, но, чтобы не усложнять изложение, обойдемся без формул. В крайнем случае, закон Ома. Уж тут ничего не поделаешь: «Не знаешь закон Ома, сиди дома!». Если уж кого эти формулы заинтересуют, то их всегда можно найти на просторах Интернета.
Частота ШИМ для светорегулятора
Как было сказано чуть выше, особых требований к стабильности частоты импульсов ШИМ не предъявляется: ну, немного «плавает», да и ладно. Подобной нестабильностью частоты, кстати, достаточно большой, обладают ШИМ - регуляторы , что не мешает их применению во многих конструкциях. В данном случае важно лишь, чтобы эта частота не стала ниже некоторого значения.
А какая должна быть частота, и насколько она может быть нестабильна? Не забывайте, что речь идет о светорегуляторах. В кинотехнике существует термин «критическая частота мельканий». Это частота, при которой отдельные картинки, показываемые друг за другом, воспринимаются как движущееся изображение. Для человеческого глаза эта частота составляет 48Гц.
Вот именно по этой причине частота съемки на кинопленке составляла 24кадр/сек (телевизионный стандарт 25кадр/сек). Для повышения этой частоты до критической в кинопроекторах применяется двухлопастной обтюратор (заслонка) дважды перекрывающий каждый показываемый кадр.
В любительских узкопленочных 8мм проекторах частота проекции составляла 16кадр/сек, поэтому обтюратор имел аж три лопасти. Тем же целям в телевидении служит тот факт, что изображение показывается полукадрами: сначала четные, а потом нечетные строки изображения. В результате получается частота мельканий 50Гц.
Работа светодиода в режиме ШИМ представляет собой отдельные вспышки регулируемой длительности. Чтобы эти вспышки воспринимались на глаз как непрерывное свечение, их частота должна быть никак не меньше критической. Выше сколько угодно, но ниже никак нельзя. Этот фактор следует учитывать при создании ШИМ - регуляторов для светильников .
Кстати, просто, как интересный факт: ученые каким-то образом определили, что критическая частота для глаза пчелы составляет 800Гц. Поэтому кинофильм на экране пчела увидит как последовательность отдельных изображений. Для того, чтобы она увидела движущееся изображение, частоту проекции потребуется увеличить до восьмисот полукадров в секунду!
Для управления собственно светодиодом используется . В последнее время наиболее широко для этой цели используются , позволяющие коммутировать значительную мощность (применение для этих целей обычных биполярных транзисторов считается просто неприличным).
Такая потребность, (мощный MOSFET - транзистор) возникает при большом количестве светодиодов, например, при , о которых будет рассказано чуть позже. Если же мощность невелика - при использовании одного - двух светодиодов, можно использовать ключи на маломощных , а при возможности подключать светодиоды непосредственно к выходам микросхем.
На рисунке 2 показана функциональная схема ШИМ - регулятора. В качестве элемента управления на схеме условно показан резистор R2. Вращением его ручки можно в необходимых пределах изменять скважность управляющих импульсов, а, следовательно, яркость светодиодов.

Рисунок 2. Функциональная схема ШИМ - регулятора
На рисунке показаны три цепочки последовательно соединенных светодиодов с ограничивающими резисторами. Примерно такое же соединение применяется в светодиодных лентах. Чем длиннее лента, тем больше светодиодов, тем больше потребляемый ток.
Именно в этих случаях потребуются мощные , допустимый ток стока которых должен быть чуть больше тока, потребляемого лентой. Последнее требование выполняется достаточно легко: например, у транзистора IRL2505 ток стока около 100А, напряжение стока 55В, при этом, его размеры и цена достаточно привлекательны для использования в различных конструкциях.
Задающие генераторы ШИМ
В качестве задающего ШИМ - генератора может использоваться микроконтроллер (в промышленных условиях чаще всего), или схема, выполненная на микросхемах малой степени интеграции. Если в домашних условиях предполагается изготовить незначительное количество ШИМ - регуляторов, а опыта создания микроконтроллерных устройств нет, то лучше сделать регулятор на том, что в настоящее время оказалось под рукой.
Это могут быть логические микросхемы серии К561, интегральный таймер , а также специализированные микросхемы, предназначенные для . В этой роли можно заставить работать даже , собрав на нем регулируемый генератор, но это уж, пожалуй, «из любви к искусству». Поэтому, далее будут рассмотрены только две схемы: самая распространенная на таймере 555, и на контроллере ИБП UC3843.
Схема задающего генератора на таймере 555

Рисунок 3. Схема задающего генератора
Эта схема представляет собой обычный генератор прямоугольных импульсов, частота которого задается конденсатором C1. Заряд конденсатора происходит по цепи «Выход - R2 - RP1- C1 - общий провод». При этом на выходе должно присутствовать напряжение высокого уровня, что равнозначно, что выход соединен с плюсовым полюсом источника питания.
Разряжается конденсатор по цепи «C1 - VD2 - R2 - Выход - общий провод» в то время, когда на выходе присутствует напряжение низкого уровня, - выход соединен с общим проводом. Вот эта разница в путях заряда - разряда времязадающего конденсатора и обеспечивает получение импульсов с регулируемой шириной.
Следует заметить, что диоды, даже одного типа, имеют разные параметры. В данном случае играет роль их электрическая емкость, которая изменяется под действием напряжения на диодах. Поэтому вместе с изменением скважности выходного сигнала меняется и его частота.
Главное, чтобы она не стала меньше критической частоты, о которой было упомянуто чуть выше. Иначе вместо равномерного свечения с различной яркостью будут видны отдельные вспышки.
Приблизительно (опять же виноваты диоды) частоту генератора можно определить по формуле, показанной ниже.

Частота генератора ШИМ на таймере 555.
Если в формулу емкость конденсатора подставить в фарадах, сопротивление в Омах, то результат должен получиться в герцах Гц: от системы СИ никуда не денешься! При этом подразумевается, что движок переменного резистора RP1 находится в среднем положении (в формуле RP1/2), что соответствует выходному сигналу формы меандр. На рисунке 2 это как раз та часть, где указана длительность импульса 50%, что равнозначно сигналу со скважностью 2.
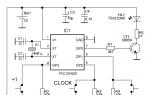
Задающий генератор ШИМ на микросхеме UC3843
Его схема показана на рисунке 4.

Рисунок 4. Схема задающего генератора ШИМ на микросхеме UC3843
Микросхема UC3843 является управляющим ШИМ - контроллером для импульсных блоков питания и применяется, например, в компьютерных источниках формата ATX. В данном случае типовая схема ее включения несколько изменена в сторону упрощения. Для управления шириной выходного импульса на вход схемы подается регулирующее напряжение положительной полярности, то на выходе получается импульсный сигнал ШИМ.
В простейшем случае регулирующее напряжение можно подать с помощью переменного резистора сопротивлением 22…100КОм. При необходимости можно управляющее напряжение получать, например, с аналогового датчика освещенности, выполненного на фоторезисторе: чем темнее за окном, тем светлее в комнате.
Регулирующее напряжение воздействует на выход ШИМ, таким образом, что при его снижении ширина выходного импульса увеличивается, что вовсе не удивительно. Ведь исходное назначение микросхемы UC3843 - стабилизация напряжения блока питания: если выходное напряжение падает, а вместе с ним и регулирующее напряжение, то надо принимать меры (увеличивать ширину выходного импульса) для некоторого повышения выходного напряжения.
Регулирующее напряжение в блоках питания вырабатывается, как правило, с помощью стабилитронов. Чаще всего это или им подобные.
При указанных на схеме номиналах деталей частота генератора около 1КГц, и в отличие от генератора на таймере 555, она при изменении скважности выходного сигнала не «плавает» - забота о постоянстве частоты импульсных блоков питания.
Чтобы регулировать значительную мощность, например, светодиодная лента, к выходу следует подключить ключевой каскад на транзисторе MOSFET, как было показано на рисунке 2.
Можно было бы и побольше рассказать о ШИМ - регуляторах, но пока остановимся на этом, а в следующей статье рассмотрим различные способы подключения светодиодов. Ведь не все способы одинаково хороши, есть такие, которых следует избегать, да и просто ошибок при подключении светодиодов случается предостаточно.
На Рисунке 1 ширина импульса на выводе 3 модулируется управляющим напряжением V CONTROL , приложенным к выводу 5. Лабораторные измерения схемы были выполнены при напряжении питания 5 В. На Рисунках 2…5 показаны выходные ШИМ сигналы при трех различных управляющих напряжениях: 1 В, 2 В и 4 В. Конденсатор C1 заряжается напряжением источника питания V SUPPLY до уровня V CONTROL и разряжается от V CONTROL /2 до уровня земли. При отсутствии внешнего управляющего напряжения напряжение V CONTROL составляет 2/3 от V SUPPLY .
Представленные осциллограммы иллюстрируют влияние управляющего напряжения, приложенного к выводу 5, на изменения пороговых напряжений двух внутренних компараторов. В отсутствие управляющего напряжения (Рисунок 4) пороги заряда и разряда C1 определяются внутренней структурой таймера и составляют 1/3 и 2/3 от напряжения питания. Этими порогами, равноудаленными от напряжения питания и земли, устанавливается коэффициент заполнения равный 50%. При изменении управляющего напряжения изменяется время заряда C1, за которое напряжение на конденсаторе должно достичь V CONTROL , и время разряда, в течение которого напряжение спадает до V CONTROL /2. Этот процесс приводит к модуляции ширины выходного импульса.
Время заряда определяется формулой

R = R1,
C =C1.
Время разряда можно вычислить из выражения

Схема 2: генератор ШИМ с компаратором
Компаратор MAX998 включается согласно Рисунку 6.
 |
|
| Рисунок 6. | ШИМ генератор и компаратор. |
Ширина выходного импульса модулируется под управлением напряжения, приложенного к R1. При напряжении питания 5 В были проведены лабораторные измерения, результаты которых представлены на Рисунках 7…9, демонстрирующих формы выходных сигналов ШИМ при управляющем напряжении, равном 1 В, 2 В и 4 В.
Приложенное к микросхеме MAX998 управляющее напряжение устанавливает пороговые напряжения, определяющие моменты начала заряда и разряда C1. Верхний порог равен

а нижнее пороговое напряжение равно V CONTROL /2.
Время заряда можно найти из формулы

Время разряда описывается выражением
R = R1,
C =C1.
Варианты ШИМ генераторов на двух микросхемах
Необходимо отметить, что управляющее напряжение в обеих схемах изменяет не только длительность импульсов, но и их частоту. Добавив в каждую из схем по одному компаратору, можно зафиксировать частоту выходных сигналов.
В Схеме 1 пилообразное напряжение с вывода 6 необходимо подать на вход второго компаратора. Это напряжение будет задавать коэффициент заполнения выходных импульсов постоянной частоты. Аналогично, в Схеме 2 на второй компаратор подается пилообразное напряжение с инвертирующего входа MAX998.
Потребовалось мне сделать регулятор скорости для пропеллера. Чтобы дым от паяльника сдувать, да морду лица вентилировать. Ну и, для прикола, уложить все в минимальную стоимость. Проще всего маломощный двигатель постоянного тока, конечно, регулировать переменным резистором, но найти резюк на такой малый номинал, да еще нужной мощности это надо сильно постараться, да и стоить он будет явно не десять рублей. Поэтому наш выбор ШИМ + MOSFET.
Ключ я взял IRF630
. Почему именно этот MOSFET
? Да просто у меня их откуда то завелось штук десять. Вот и применяю, так то можно поставить что либо менее габаритное и маломощное. Т.к. ток тут вряд ли будет больше ампера, а IRF630
способен протащить через себя под 9А. Зато можно будет сделать целый каскад из вентиляторов, подсоединив их к одной крутилке — мощи хватит:)
Теперь пришло время подумать о том, чем мы будем делать ШИМ
. Сразу напрашивается мысль — микроконтроллером. Взять какой-нибудь Tiny12 и сделать на нем. Мысль я эту отбросил мгновенно.
- Тратить такую ценную и дорогую деталь на какой то вентилятор мне западло. Я для микроконтроллера поинтересней задачу найду
- Еще софт под это писать, вдвойне западло.
- Напряжение питания там 12 вольт, понижать его для питания МК до 5 вольт это вообще уже лениво
- IRF630 не откроется от 5 вольт, поэтому тут пришлось бы еще и транзистор ставить, чтобы он подавал высокий потенциал на затвор полевика. Нафиг нафиг.
Операционные усилители можно отбросить сразу. Дело в том, что у ОУ общего назначения уже после 8-10кГц, как правило, предельное выходное напряжение
начинает резко заваливаться, а нам надо полевик дрыгать. Да еще на сверхзвуковой частоте, чтобы не пищало.
ОУ лишенные такого недостатка стоят столько, что на эти деньги можно с десяток крутейших микроконтроллеров купить. В топку!
Остаются компараторы, они не обладают способностью операционника плавно менять выходное напряжение, могут только сравнивать две напруги и замыкать выходной транзистор по итогам сравнения, но зато делают это быстро и без завала характеристики. Пошарил по сусекам и компараторов не нашел. Засада! Точнее был LM339 , но он был в большом корпусе, а впаивать микросхему больше чем на 8 ног на такую простую задачу мне религия не позволяет. В лабаз тащиться тоже было влом. Что делать?
И тут я вспомнил про такую замечательную вещь как аналоговый таймер — NE555
. Представляет собой своеобразный генератор, где можно комбинацией резисторов и конденсатором задавать частоту, а также длительность импульса и паузы. Сколько на этом таймере разной хрени сделали, за его более чем тридцатилетнюю историю… До сих пор эта микросхема, несмотря на почтенный возраст, штампуется миллионными тиражами и есть практически в каждом лабазе по цене в считанные рубли. У нас, например, он стоит около 5 рублей. Порылся по сусекам и нашел пару штук. О! Щас и замутим.
 |
Как это работает
Если не вникать глубоко в структуру таймера 555, то несложно. Грубо говоря, таймер следит за напряжением на конденсаторе С1, которое снимает с вывода THR
(THRESHOLD — порог). Как только оно достигнет максимума (кондер заряжен), так открывается внутренний транзистор. Который замыкает вывод DIS
(DISCHARGE — разряд) на землю. При этом на выходе OUT
появляется логический ноль. Конденсатор начинает разряжаться через DIS
и когда напряжение на нем станет равно нулю (полный разряд) система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R4->верхнее плечо R1 ->D2
«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS
. Когда мы крутим переменный резистор R1 то у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе.
Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1.
Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Диоды можно ставить любые совершенно, кондеры примерно такого номинала, отклонения в пределах одного порядка не влияют особо на качество работы. На 4.7нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно, видать слух у меня уже не идеальный:(
Покопался в закромах, которая сама расчитывает параметры работы таймера NE555 и собрал схему оттуда, для астабильного режима со коэффициентом заполнения меньше 50%, да вкрутил там вместо R1 и R2 переменный резистор, которым у меня менялась скважность выходного сигнала. Надо только обратить внимание на то, что выход DIS (DISCHARGE) через внутренний ключ таймера подключен на землю, поэтому нельзя было его сажать напрямую к потенциометру , т.к. при закручивании регулятора в крайнее положение этот вывод бы сажался на Vcc. А когда транзистор откроется, то будет натуральное КЗ и таймер с красивым пшиком испустит волшебный дым, на котором, как известно, работает вся электроника. Как только дым покидает микросхему — она перестает работать. Вот так то. Посему берем и добавляем еще один резистор на один килоом. Погоды в регулировании он не сделает, а от перегорания защитит.
Сказано — сделано. Вытравил плату, впаял компоненты:
Снизу все просто.
Вот и печатку прилагаю, в родимом Sprint Layout —
А это напряжение на движке. Видно небольшой переходный процесс. Надо кондерчик поставить в параллель на пол микрофарады и его сгладит.
Как видно, частота плывет — оно и понятно, у нас ведь частота работы зависит от резисторов и конденсатора, а раз они меняются, то и частота уплывает, но это не беда. Во всем диапазоне регулирования она ни разу не влазит в слышимый диапазон. А вся конструкция обошлась в 35 рублей, не считая корпуса. Так что — Profit!
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода - полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.

В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий - модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала - на выходе будет отрицательная часть импульса.

Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал - на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное - когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ - микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.

Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации - это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.

Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.

Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.